# 1 交叉编译器
交叉编译器用于在Linux PC上编译嵌入式Linux平台上的项目(tslib),此处采用交叉工具链压缩包(gcc-4.4.4-glibc-2.11.1-multilib-1.0_EasyARM-iMX283.tar.bz2),在Ubuntu虚拟机上的安装配置步骤如下:
备注:交叉编译工具链:https://cloud.189.cn/t/MRzQb2beeEFf(访问码:ph5h)
# 1.1 安装交叉编译器
将gcc-4.4.4-glibc-2.11.1-multilib-1.0_EasyARM-iMX283.tar.bz2拷贝到Ubuntu虚拟机上,解压到指定目录(添加环境变量会使用该目录),此处目录为/home/user/tools/,在压缩包目录下打开终端,执行以下命令:
tar -jxvf gcc-4.4.4-glibc-2.11.1-multilib-1.0_EasyARM-iMX283.tar.bz2 –C /home/user/tools/
解压完成后可在gcc-4.4.4-glibc-2.11.1-multilib-1.0/arm-fsl-linux-gnueabi/bin目录下看到交叉编译器。
# 1.2 设置环境变量
打开全局配置文件,在终端中执行以下命令:
sudo vim /etc/profile
在文件末尾将交叉编译器所在的路径添加到全局环境变量中,需要添加的文本如下:
export PATH=$PATH:/home/user/tools/gcc-4.4.4-glibc-2.11.1-multilib-1.0/arm-fsl-linux-gnueabi/bin/
执行修改过后的全局配置文件,在终端中执行以下命令(点+空格+文件名):
. /etc/profile
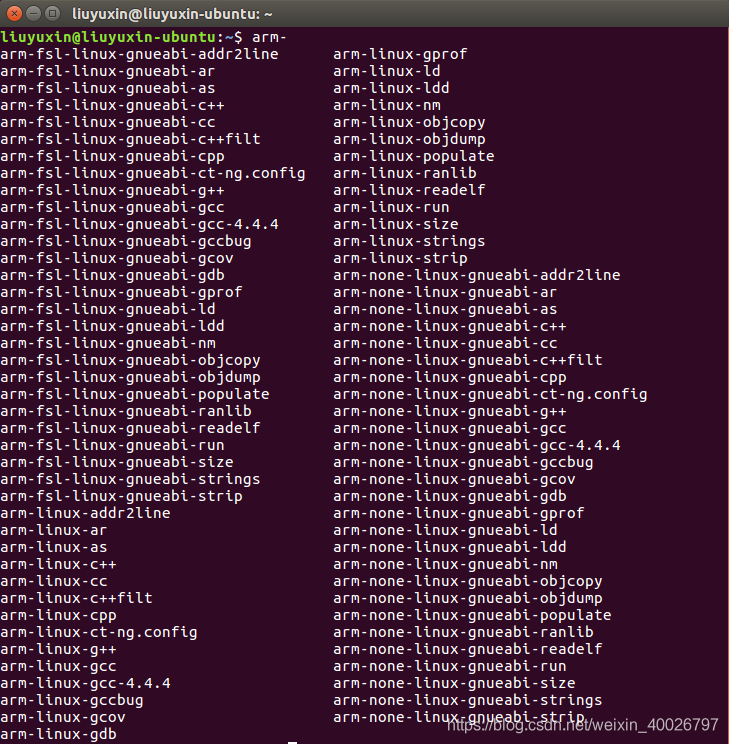
执行完毕后重启虚拟机,检查交叉编译器是否成功添加至全局变量,在终端中输入“arm-”,然后按下键盘上的TAB键,若添加成功,则可以看见很多“arm-fsl-linux-gnueabi”、 “arm-linux”、“arm-none-linux-gnueabi”开头的命令,如下图所示:
# 1.3 测试交叉编译器
在终端中输入交叉编译器命令,例如arm-none-linux-gnueabi-gcc,然后回车,能够得到以下信息,说明交叉编译器能够正常工作:
arm-none-linux-gnueabi-gcc
arm-none-linux-gnueabi-gcc: no input files
若输出以下信息,则交叉编译器仍然存在问题,无法正常工作:
arm-none-linux-gnueabi-gcc
bash:/home/user/tools/gcc-4.4.4-glibc-2.11.1-multilib-1.0/arm-fsl-linux-gnueabi/bin/arm-none-linux-gnueabi-gcc: 没有那个文件或目录
此时请确认:
- 在安装目录的bin文件下确实有arm-none-linux-gnueabi-gcc文件;
- 在终端输入arm-none-linux-gnueabi-,按下键盘的TAB键,能找到该命令。
如果以上两个条件都确认无误,那么问题就好解决了。这种问题主要发生在64位操作系统上,原因在于大多数交叉编译器为了适应性,通常以32位发布,而实际操作系统是64位的,存在架构差异,所以无法执行。
解决方案是在64位的Ubuntu上安装32位兼容库,在终端中执行以下命令:
sudo apt-get install lib32z1
安装完成后,再重复以上测试步骤,即可输出正常结果。
# 2 移植tslib-1.4
tslib是一个开源程序,能够为触摸屏驱动获得的采样提供诸如滤波、去抖动、校准等功能,通常作为触摸屏驱动的适配层,为上层的应用提供了一个统一接口。
备注:tslib-1.4源码:https://cloud.189.cn/t/VRv2qmFfqmIz(访问码:t0ov)
此处在Ubuntu虚拟机上安装并编译tslib-1.4,再将生成的tslib文件夹整个拷贝到嵌入式Linux平台。
在Ubuntu虚拟机中安装并编译tslib-1.4的步骤如下:
(1)在Ubuntu上安装autoconf、automake和libtool,在终端中执行以下命令:
sudo apt-get install autoconf
sudo apt-get install automake
sudo apt-get install libtool
(2)将tslib-1.4.tar.gz拷贝到Ubuntu虚拟机上,解压,在压缩包目录下打开终端,执行以下命令:
sudo tar -zxvf tslib-1.4.tar.gz
(3)进入解压目录,在终端中执行以下命令(可复制到Ubuntu上再修改路径):
cd tslib-1.4
sudo ./autogen.sh
sudo ./configure --prefix=/home/user/tools/tslib --host=arm-fsl-linux-gnueabi CC=/home/user/tools/gcc-4.4.4-glibc-2.11.1-multilib-1.0/arm-fsl-linux-gnueabi/bin/arm-none-linux-gnueabi-gcc ac_cv_func_malloc_0_nonnull=yes
- --prefix指定安装路径,可自行指定tslib的安装目录;
- --host指定交叉编译器,此处指定交叉编译器是arm-fsl-linux-gnueabi;
- CC指使用的交叉编译器,请与本地安装的交叉编译器路径一致。
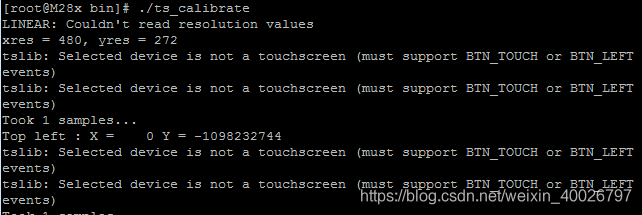
(4)由于本文使用的Linux开发板的触摸屏驱动没有提供ioctl接口,因此需要屏蔽tslib中ioctl相关代码(若触摸屏驱动有ioctl接口,则跳过该步骤),否则在Linux开发板上运行ts_calibrate会有如下图所示的错误,屏蔽方法为修改tslib-1.4/plugins/input-raw.c文件中的check_fb函数,将该函数修改为以下代码:
static int check_fd(struct tslib_input *i)
{
i->using_syn = 1;
return 0;
}
(5)编译tslib,在终端中执行以下命令:
sudo make
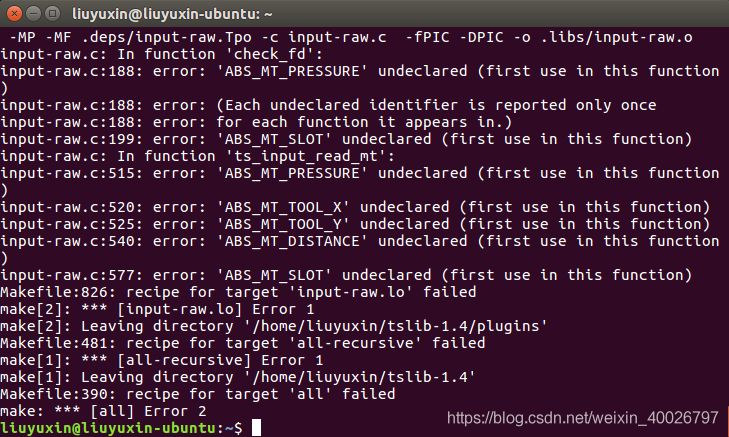
若出现如下图所示的错误,是因为Ubuntu内核比较老,相关的宏定义在内核的头文件中没有,需要在tslib库中的头文件(src/tslib.h)声明。
打开解压目录下的src/tslib.h文件,在终端中输入以下指令:
sudo vim src/tslib.h
在src/tslib.h文件中添加以下宏定义,添加完成后保存,再编译即可:
#define ABS_MT_SLOT 0x2f /* MT slot being modified */
#define ABS_MT_PRESSURE 0x3a /* Pressure on contact area */
#define ABS_MT_DISTANCE 0x3b /* Contact hover distance */
#define ABS_MT_TOOL_X 0x3c /* Center X tool position */
#define ABS_MT_TOOL_Y 0x3d /* Center Y tool position */
(6)安装tslib到第(3)步设置的目录中(--prefix指定的安装路径),在终端中执行以下命令:
sudo make install
若可以看到该指定路径下有4个文件夹:/bin、/ect、/lib、/include,则表示安装完成。
(7)为了在移植开发板的时候,可以制定输入模块,需要修改ts.conf文件,进入安装目录下的/ect/文件夹,打开终端,打开ts.conf文件,在终端中输入以下命令:
sudo vim ts.conf
找到#module_raw input那一行,去掉注释#,并检查ts.conf文件是否有以下定义,至此在Ubuntu上安装tslib完成。
module_raw input
module pthres pmin=1
module variance delta=30
module dejitter delta=100
module linear
(8)将生成的tslib文件夹整个拷贝到嵌入式Linux平台。比如此次拷贝到/usr/local/目录中
(9)打开Linux开发板的环境变量文件/etc/profile,在终端中执行以下命令:
vi /etc/profile
(10)在/etc/profile文件文件末尾添加如下内容:
export TSLIB_ROOT=/usr/local/tslib /* 指定tslib目录路径 */
export TSLIB_TSDEVICE=/dev/input/event0 /* 指定触摸屏设备 */
export TSLIB_CALIBFILE=/etc/pointercal /* 指定校准文件的存放位置 */
export TSLIB_CONFFILE=$TSLIB_ROOT/etc/ts.conf /* 指定tslib配置文件的路径 */
export TSLIB_PLUGINDIR=$TSLIB_ROOT/lib/ts /* 指定tslib插件文件的路径 */
export TSLIB_FBDEVICE=/dev/fb0 /* 指定帧缓冲设备 */
export QWS_MOUSE_PROTO=tslib:/dev/input/event0 /* 指定鼠标设备 */
export LD_LIBRARY_PATH=$TSLIB_ROOT/lib:$LD_LIBRARY_PATH /* 添加tslib库 */
其中TSLIB_ROOT更改为自己实际存放的tslib的绝对路径。
TSLIB_TSDEVICE和QWS_MOUSE_PROTO这两项需要查看自己的开发板触摸屏设备对应/dev/input下的文件。例如本文采用的iMX287A开发板中的触摸屏设备文件所在路径为/dev/input/event0。
(11)重新启动Linux开发板,使系统重新读取/etc/profile的环境变量,在终端执行以下命令:
reboot
(12)进入/usr/local/tslib/bin目录,运行ts_calibrate,测试tslib是否安装和移植完成,在终端中执行以下命令:
cd /usr/local/tslib/bin
./ts_calibrate
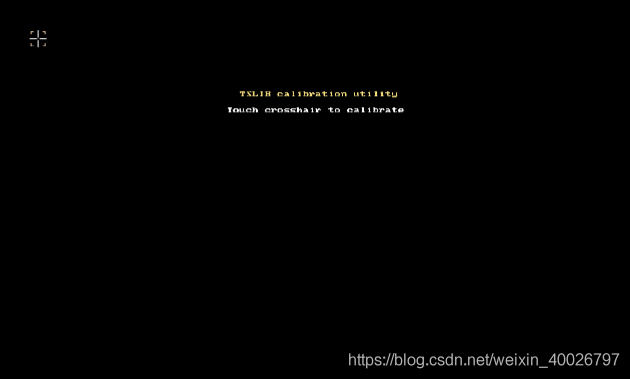
若Linux开发板出现如下图所示的界面,则tslib安装和移植完成。