# 1 前言
近期因工作需求学习了一下 IOT.js 和 AWorks 平台通用外设接口(包括:ADC、GPIO、I2C、PWM、SPI 和 UART),并将它们逐一适配到 IOT.js 中,为后续 AWTK-MVMM (opens new window) 的 JS项目支持平台外设调用奠定基础,此处做笔记记录一下。
- IOT.js适配AWorks平台通用外设接口(1):ADC;
- IOT.js适配AWorks平台通用外设接口(2):GPIO;
- IOT.js适配AWorks平台通用外设接口(3):I2C;
- IOT.js适配AWorks平台通用外设接口(4):PWM;
- IOT.js适配AWorks平台通用外设接口(5):SPI;
- IOT.js适配AWorks平台通用外设接口(6):UART;
备注:IOT.js 和 AWorks 的相关介绍请看第一篇 ADC 适配笔记。
# 2 SPI
# 2.1 SPI总线
SPI(Serial Peripheral Interface)是一种全双工同步串行通信接口,常用于短距离高速通信,其数据传输速率通常可达到几M甚至几十M。SPI通信采用主/从结构,主/从双方通信时,需要使用到4根信号线:SCLK、MOSI、MISO、CS。其典型的连接示意图如下:
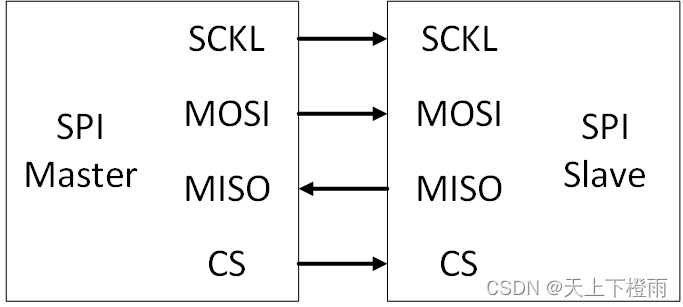
- SCLK:时钟信号,由主机设备产生。
- MOSI:主机数据输出,从机数据输入。
- MISO:从机数据输出,主机数据输入。
- CS:片选信号,由主设备控制。
数据传输是由主机发起,主机在串行数据传输前驱动CS信号,使之变为有效状态(通常情况下,有效状态为低电平),接着,在SCLK上输出时钟信号,在时钟信号的同步下,每个时钟传输一位数据,主机数据通过MOSI传输至从机,从机数据通过MISO传输至主机,数据传输完毕后,主机释放CS信号,使之变为无效状态,一次数据传输完成。
一个主机可以连接多个从机,多个从机共同使用SCLK、MOSI、MISO三根信号线,每个从机的片选信号 CS 是独立的,因此,若主机连接多个从机,就需要多个片选控制引脚。当一个主机连接多个从机时,同一时刻最多只能使一个片选信号有效,以选择一个确定的从机作为数据通信的目标对象,也就是说,在某一时刻,最多只能激活寻址一个从机,以使各个从机之间相互独立的使用,互不干扰。注意没在单个通信网络中,可以有多个从机,但有且只能有一个主机。
# 2.2 SPI接口
绝大部分情况下,MCU都作为SPI主机与SPI从机器件通信,因此这里仅介绍 AWorks中将MCU作为SPI主机的相关接口:
- aw_spi_mkdev:初始化SPI从机实例。
- aw_spi_setup:设置SPI从机实例。
- aw_spi_write_then_read:SPI先写后读。
- aw_spi_write_then_write:执行SPI两次写。
# 3 适配过程
# 3.1 AWorks演示代码
先来看看这些SPI相关接口的基本用法,我们在底板上跑一下简单的例程。
步骤一:外设使能,在AWorks工程配置文件 aw_prj_params.h 中开启以下宏定义使能SPI:
#define AW_DEV_IMX1050_LPSPI3 /**< \brief iMX1050 LPSPI3 (SPI3) */
步骤二:到外设文件中查看设备对应的引脚,比如这里查看 awbl_hwconf_imx1050_lpspi3.h 文件,可以看到该SPI3设备的CS、MISO、MOSI、SCK分别使用GPIO1_28、GPIO1_29、GPIO1_30、GPIO1_31引脚,分别对应底板上的ss、MISO、MOSI、CLK引脚,我们需确定这些引脚能正常使用。
步骤三:编写例程,测试SPI主机模式的基本读写功能。示例代码如下:
#include "aworks.h" /* 此头文件必须被首先包含 */
#include "aw_delay.h" /* 延时服务 */
#include "aw_spi.h"
#include "aw_gpio.h"
#include "aw_vdebug.h"
#include "aw_demo_config.h"
#define HARD_CS_CFG 1
//#define SOFT_CS_CFG 1 /* 使用软件CS请打开spi配置文件,关闭硬件CS模式*/
/** \brief SPI1的配置 */
#define SPI_DEV_BUSID DE_SPI_DEV_BUSID /**< \brief SPI总线 */
#define SPI_DEV_MODE AW_SPI_CPHA /**< \brief SPI模式 */
#define SPI_DEV_SPEED 2000000 /**< \brief SPI速度 */
#define SPI_DEV_BPW 8 /**< \brief SPI数据位数,取值只能是8、16、32 */
#define SPI_TEST_LEN 16 /**< \brief SPI收发数据量 */
#define SPI_CS_PIN DE_SPI_CS_PIN /**< \brief SPI片选引脚,根据具体平台修改 */
struct aw_spi_message spi_msg;
struct aw_spi_transfer spi_trans;
#if HARD_CS_CFG
void pfunc_cs (int state){
return ;
}
#endif
/*
* \brief 测试SPI主机模式的基本读写功能
*/
int main() {
aw_spi_device_t spi_dev;
int ret;
int i;
#if SPI_DEV_BPW == 8
uint8_t read_buf[SPI_TEST_LEN] = {0};
uint8_t write_buf[SPI_TEST_LEN] = {0};
#elif SPI_DEV_BPW == 16
uint16_t read_buf[SPI_TEST_LEN] = {0};
uint16_t write_buf[SPI_TEST_LEN] = {0};
#elif SPI_DEV_BPW == 32
uint32_t read_buf[SPI_TEST_LEN] = {0};
uint32_t write_buf[SPI_TEST_LEN] = {0};
#endif
#if SOFT_CS_CFG
int cs_pin = SPI_CS_PIN;
/* 配置SPI之前需先申请CS引脚 */
aw_gpio_pin_request("spi_demo_cs", &cs_pin, 1);
#endif
/* 生成 SPI FLASH 设备 */
aw_spi_mkdev(&spi_dev,
SPI_DEV_BUSID, /* 位于哪条SPI总线上 */
SPI_DEV_BPW, /* 字大小 */
SPI_DEV_MODE, /* SPI 模式 */
SPI_DEV_SPEED, /* 支持的最大速度 */
#if HARD_CS_CFG
NULL, /* 片选引脚 */
pfunc_cs); /* 无自定义的片选控制函数 */
#else
cs_pin, /* 片选引脚 */
NULL); /* 无自定义的片选控制函数 */
#endif
if (aw_spi_setup(&spi_dev) != AW_OK) {
aw_kprintf("aw_spi_setup fail!\r\n");
goto _exit ;
}
/* 设置发送数据 */
for (i = 0; i < SPI_TEST_LEN; i++) {
write_buf[i] = i;
}
memset(read_buf,0,SPI_TEST_LEN);
while(1){
/* 传输数据 */
ret = aw_spi_write_and_read (&spi_dev, write_buf, read_buf, sizeof(write_buf));
if (ret != AW_OK) {
aw_kprintf("__spi_trans fail!\r\n");
goto _exit ;
}
aw_kprintf("write_buf:");
for(i = 0; i < SPI_TEST_LEN;i++){
aw_kprintf("%d ",write_buf[i]);
}
aw_kprintf("\r\n");
aw_kprintf("read_buf:");
for(i = 0; i < SPI_TEST_LEN;i++){
aw_kprintf("%d ",read_buf[i]);
}
aw_kprintf("\r\n");
aw_mdelay(500);
}
_exit:
#if SOFT_CS_CFG
/* 测试完成后释放CS引脚 */
aw_gpio_pin_release(&cs_pin, 1);
#endif
return 0;
}
输出结果:
write_buf:0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
read_buf:0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
# 3.2 C语言适配层
在 IOT.js 中,适配某个平台的外设通常需要实现 src/modules/iotjs_module_xxx.h 文件中的接口,比如这里我们需要实现 iotjs_module_spi.h 中的相关接口:
#ifndef IOTJS_MODULE_SPI_H
#define IOTJS_MODULE_SPI_H
#include "iotjs_def.h"
#include "iotjs_module_buffer.h"
#include "iotjs_module_periph_common.h"
typedef enum {
kSpiMode_0,
kSpiMode_1,
kSpiMode_2,
kSpiMode_3,
__kSpiModeMax
} SpiMode;
typedef enum { kSpiCsNone, kSpiCsHigh, __kSpiCsMax } SpiChipSelect;
typedef enum { kSpiOrderMsb, kSpiOrderLsb, __kSpiOrderMax } SpiOrder;
// Forward declaration of platform data. These are only used by platform code.
// Generic SPI module never dereferences platform data pointer.
typedef struct iotjs_spi_platform_data_s iotjs_spi_platform_data_t;
// This SPI class provides interfaces for SPI operation.
typedef struct {
jerry_value_t jobject;
iotjs_spi_platform_data_t* platform_data;
SpiMode mode;
SpiChipSelect chip_select;
SpiOrder bit_order;
uint8_t bits_per_word;
uint16_t delay;
uint32_t max_speed;
bool loopback;
// SPI buffer
char* tx_buf_data;
char* rx_buf_data;
uint8_t buf_len;
} iotjs_spi_t;
jerry_value_t iotjs_spi_set_platform_config(iotjs_spi_t* spi,
const jerry_value_t jconfig);
bool iotjs_spi_open(iotjs_spi_t* spi);
bool iotjs_spi_transfer(iotjs_spi_t* spi);
bool iotjs_spi_close(iotjs_spi_t* spi);
// Platform-related functions; they are implemented
// by platform code (i.e.: linux, nuttx, tizen).
void iotjs_spi_create_platform_data(iotjs_spi_t* spi);
void iotjs_spi_destroy_platform_data(iotjs_spi_platform_data_t* pdata);
#endif /* IOTJS_MODULE_SPI_H */
适配层(src/modules/aworks/iotjs_module_spi-aworks.c)代码如下:
#if !defined(WITH_AWORKS)
#error "Module __FILE__ is for AWorks only"
#endif
#include "iotjs_def.h"
#include "aw_spi.h"
#include "modules/iotjs_module_spi.h"
struct iotjs_spi_platform_data_s {
int bus;
aw_spi_device_t spi_dev;
};
static int mode_to_constant(SpiMode mode) {
switch (mode) {
case kSpiMode_0:
return AW_SPI_MODE_0;
case kSpiMode_1:
return AW_SPI_MODE_1;
case kSpiMode_2:
return AW_SPI_MODE_2;
case kSpiMode_3:
return AW_SPI_MODE_3;
}
return -1;
}
static int clip_select_to_constant(SpiOrder order) {
switch (order) {
case kSpiCsNone:
return 0;
case kSpiCsHigh:
return AW_SPI_CS_HIGH;
}
return -1;
}
static int order_to_constant(SpiOrder order) {
switch (order) {
case kSpiOrderMsb:
return 0;
case kSpiOrderLsb:
return AW_SPI_LSB_FIRST;
}
return -1;
}
static void pfunc_cs(int state) {
return;
}
void iotjs_spi_create_platform_data(iotjs_spi_t* spi) {
spi->platform_data = IOTJS_ALLOC(iotjs_spi_platform_data_t);
spi->platform_data->bus = -1;
}
void iotjs_spi_destroy_platform_data(iotjs_spi_platform_data_t* platform_data) {
IOTJS_ASSERT(platform_data);
IOTJS_RELEASE(platform_data);
}
jerry_value_t iotjs_spi_set_platform_config(iotjs_spi_t* spi,
const jerry_value_t jconfig) {
iotjs_spi_platform_data_t* platform_data = spi->platform_data;
JS_GET_REQUIRED_CONF_VALUE(jconfig, platform_data->bus,
IOTJS_MAGIC_STRING_BUS, number);
return jerry_create_undefined();
}
bool iotjs_spi_open(iotjs_spi_t* spi) {
aw_err_t ret;
int mode;
int order;
int clip_select;
uint16_t flags;
iotjs_spi_platform_data_t* platform_data = spi->platform_data;
mode = mode_to_constant(spi->mode);
order = order_to_constant(spi->bit_order);
clip_select = order_to_constant(spi->chip_select);
if (mode < 0 || order < 0 || clip_select < 0) {
DLOG("%s: spi open error: bad config param.", __func__);
return false;
}
flags = mode | order | clip_select;
aw_spi_mkdev(&platform_data->spi_dev, /* SPI设备实例 */
platform_data->bus, /* SPI总线编号 */
spi->bits_per_word, /* 数据位宽 */
flags, /* 设备模式标志 */
spi->max_speed, /* 支持最大速度 */
0, /* 片选引脚(这里使用硬件片选) */
pfunc_cs /* 片选控制函数(为NULL时使用软件片选) */
);
ret = aw_spi_setup(&platform_data->spi_dev);
if (ret != AW_OK) {
memset(&platform_data->spi_dev, 0x00, sizeof(aw_spi_device_t));
DLOG("%s: spi setup error(%d)", __func__, ret);
return false;
}
DDLOG(
"SPI Options \n mode: %d\n chipSelect: %d\n bitOrder: %d\n "
"maxSpeed: %d\n bitPerWord: %d\n",
spi->mode, spi->chip_select, spi->bit_order, spi->max_speed,
spi->bits_per_word);
return true;
}
bool iotjs_spi_transfer(iotjs_spi_t* spi) {
aw_err_t ret;
iotjs_spi_platform_data_t* platform_data = spi->platform_data;
ret = aw_spi_write_and_read(&platform_data->spi_dev, (void*)spi->tx_buf_data,
(void*)spi->rx_buf_data, spi->buf_len);
if (ret != AW_OK) {
DDLOG("%s - transfer failed: %d", __func__, ret);
return false;
}
return true;
}
bool iotjs_spi_close(iotjs_spi_t* spi) {
iotjs_spi_platform_data_t* platform_data = spi->platform_data;
platform_data->bus = -1;
memset(&platform_data->spi_dev, 0x00, sizeof(aw_spi_device_t));
return true;
}
# 3.2 JS测试代码
适配好后,我们编写 JS 代码测试一下:
var spi = require('spi');
var configuration = {
bus: 2, /* 使用SPI3的总线编号 */
mode: spi.MODE[1], /* 模式一 */
maxSpeed: 2000000, /* 单位:Hz,表示最大速度2M */
bitsPerWord: 8, /* 数据位宽(目前仅支持8位) */
};
console.log('test start');
var spiObj = spi.openSync(configuration);
var data = 'Hello Iotjs!'; /* 发送字符串 */
// var data = [0x90, 0x00, 0x00, 0x00, 0xff, 0xff]; /* 发送数组(该指令用来获取从机ID,需要配套的SPI从机芯片) */
var tx = new Buffer(data);
var loopCnt = 1;
var loop = setInterval(function () {
var rx = spiObj.transferSync(tx);
var len = data.length;
console.log('data.length: ', len);
var value = '';
for (var i = 0; i < len; i++) {
// console.log(rx[i]); /* 打印读取数据的原始值 */
value += String.fromCharCode(rx[i]);
}
console.log(value);
if (--loopCnt <= 0) {
clearInterval(loop);
spiObj.closeSync();
console.log('test complete');
}
}, 1000);
输出结果:
test start
data.length:12
Hello Iotjs!
test complete